We're particularly excited about using CodeClash as a platform to explore collaboration and competition among human and AI programmers.
In the inaugural blog post of this series, we aim to answer a simple question: Where does AI rank among human competitors?
We decided, the simplest way to address this, is find top-ranked, human-written submissions from existing leaderboards and pit them against LMs.
Finding Top Submissions
To investigate this, we scoured the web for online leaderboards of the code arenas supported in CodeClash. This was surprisingly challenging:
- We couldn't find leaderboards for some arenas (Core War, RoboCode).
- Poker (HuskyBench) has a great website, but as an LM evaluation, there's no human-written submissions.
- Halite probably has a leaderboard somewhere, but we couldn't find it. The one on the resurrected website seems to be filled with test bots.
- Halite III (which we'll support soon) has a Kaggle leaderboard.
- BattleSnake has an awesome, active official leaderboard with ranked submissions. But most submissions are closed source, and we couldn't find a way to filter for open source bots only.
RobotRumble ended up being the only arena with a leaderboard that fit our search criteria:
- Has many human-written submissions
- The submissions are ranked
- Some submissions are open source
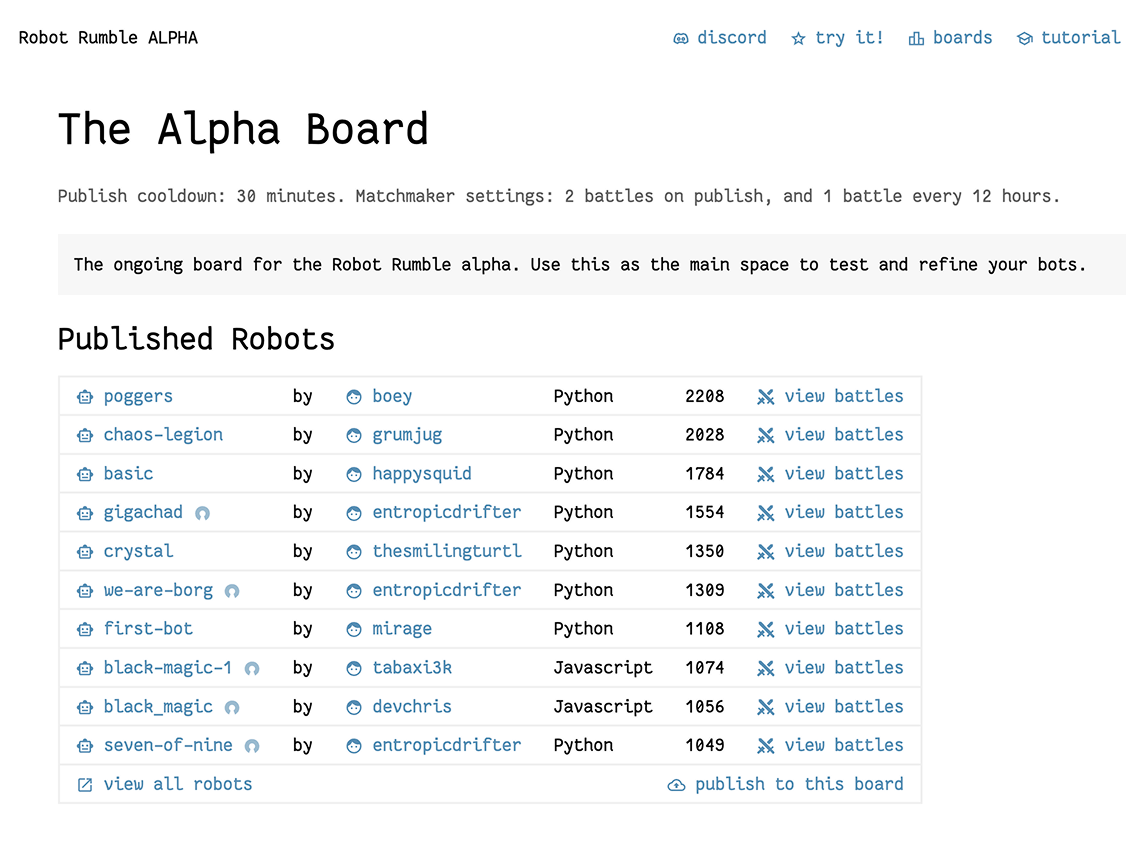
As of October 31, 2025, the top-ranked open-source submission on RobotRumble is
 gigachad by user entropic-drifter (link).
gigachad by user entropic-drifter (link).
The Showdown
We ran CodeClash tournaments between
gigachad and Claude Sonnet 4.5, the top ranked LM on RobotRumble as of 11/2025.
The details:
- Ran 10 tournaments of 15 rounds each
- Each round's competition phase ran 250 simulations
- Claude 4.5 Sonnet was ran with temperature 0.2 and max tokens 4096
- Claude 4.5 Sonnet uses mini-swe-agent as the agent scaffold
- On the other hand,
gigachad is held constant across all tournaments. In other words, no human or LM is optimizing gigachad between rounds.
We were pretty surprised by the results.
True to its namesake,
gigachad
dominates Claude Sonnet 4.5, winning
- 10/10 tournaments
- 150/150 rounds
- 37,500/37,500 simulations
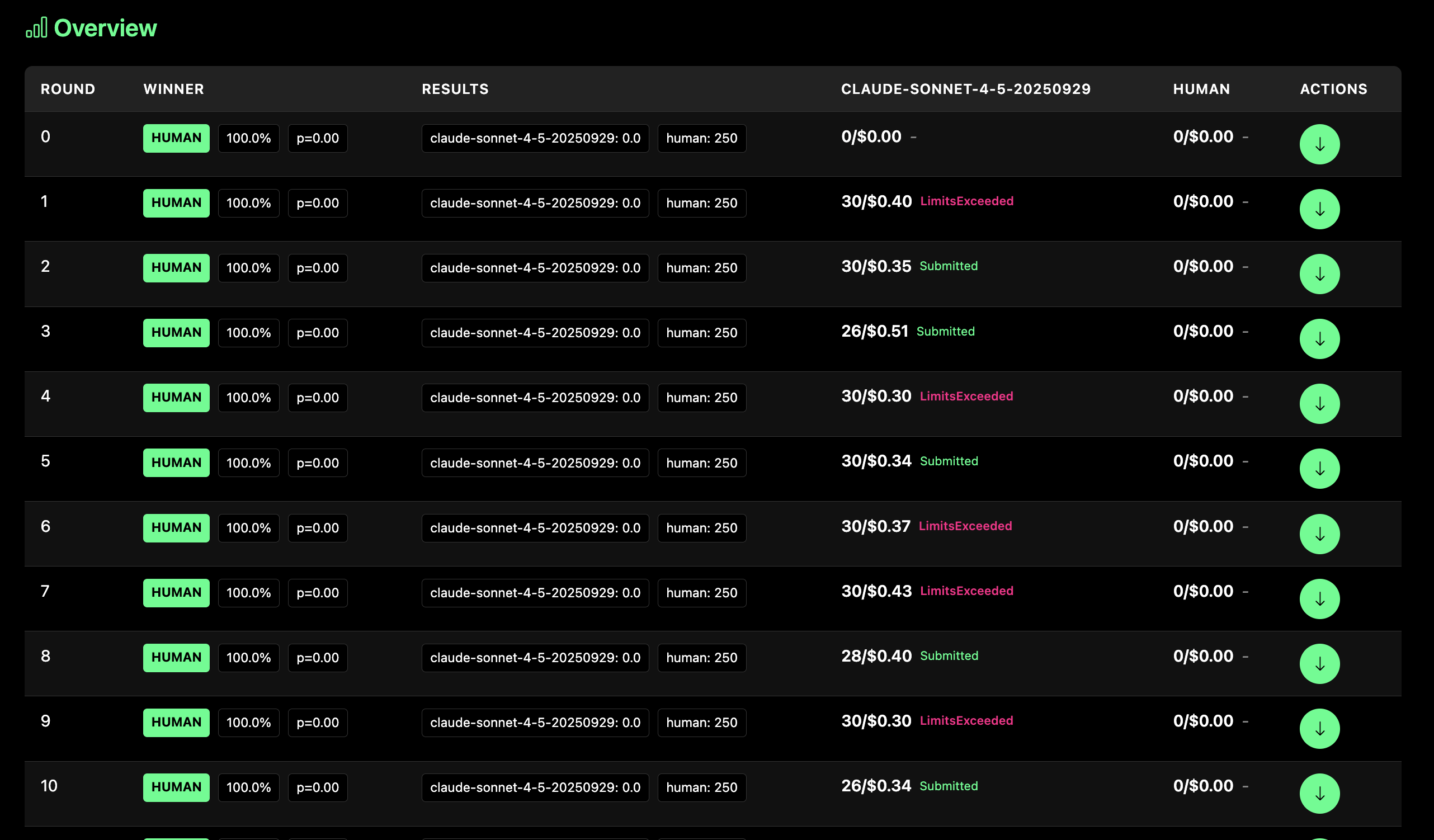
We didn't necessarily expect Claude Sonnet 4.5 to write a better bot than
gigachad, but what surprised us was the magnitude of the difference.
What went wrong?
In our original paper, we discuss several weaknesses with regards to LMs as long-horizon, self-improving developers:
- Model codebases become messier over time without proper refactoring
- Models don't really reuse or build on files
- Models generate a lot of redundant, single-use code
- Models dump all these files in the root directory, rather than organize them into folders
- Models don't draw insights from prior runs effectively. Models do look at competition logs, but the analysis is often shallow, such as just reading the first couple lines or calculating win rate. But it won't...
- Understand the format of logs deeply (e.g., by reading docs)
- Look at multiple logs together to identify patterns
- Models draw questionable conclusions from their insights
From these runs, we see these weaknesses clearly manifested.
1. Messy Codebases: Claude Sonnet 4.5 creates 33 files by the end of the tournament (PR).
analyze_logs.py,analyze_round.pyare a bit redundant.check_spawn*.pycould be combined.combat_analysis.py,detailed_analysis.pyoverlap in functionality.

2. Shallow Analysis: In this tournament, Claude Sonnet 4.5 does reuse the analyze_logs.py (yay!), but the analysis is somewhat shallow.
- It only looks at three simulations (first/middle/last) of each round.
- It just summarizes scores and winners, which is technically already in
results.json. - The analysis states facts (e.g., winner, initial/final units), but there's not much around why units were lost or how a competition actually unfolded.
Show `analyze_logs.py` code
import json
import os
from collections import defaultdict
def analyze_simulation(sim_file):
"""Analyze a single simulation file"""
with open(sim_file, 'r') as f:
data = json.load(f)
winner = data.get('winner', 'Unknown')
turns = data.get('turns', [])
if not turns:
return None
# Get initial and final state
initial_state = turns[0]['state']
final_state = turns[-1]['state']
# Count units by team
def count_units(state):
red_units = 0
blue_units = 0
for obj in state['objs'].values():
if obj.get('obj_type') == 'Unit':
if obj.get('team') == 'Red':
red_units += 1
elif obj.get('team') == 'Blue':
blue_units += 1
return red_units, blue_units
initial_red, initial_blue = count_units(initial_state)
final_red, final_blue = count_units(final_state)
return {
'winner': winner,
'turns': len(turns),
'initial_red': initial_red,
'initial_blue': initial_blue,
'final_red': final_red,
'final_blue': final_blue
}
def analyze_round(round_dir):
"""Analyze all simulations in a round"""
results_file = os.path.join(round_dir, 'results.json')
if not os.path.exists(results_file):
print(f"No results.json found in {round_dir}")
return
with open(results_file, 'r') as f:
results = json.load(f)
print(f"\n=== Round {results['round_num']} Results ===")
print(f"Winner: {results['winner']}")
print(f"Scores: {results['scores']}")
# Analyze a few sample simulations
sim_files = [f for f in os.listdir(round_dir) if f.startswith('sim_') and f.endswith('.json')]
sim_files.sort(key=lambda x: int(x.split('_')[1].split('.')[0]))
print(f"\nTotal simulations: {len(sim_files)}")
# Sample first, middle, and last simulations
samples = []
if len(sim_files) > 0:
samples.append(sim_files[0])
if len(sim_files) > 1:
samples.append(sim_files[len(sim_files)//2])
if len(sim_files) > 2:
samples.append(sim_files[-1])
print("\nSample simulations:")
for sim_file in samples:
sim_path = os.path.join(round_dir, sim_file)
analysis = analyze_simulation(sim_path)
if analysis:
print(f"\n{sim_file}:")
print(f" Winner: {analysis['winner']}")
print(f" Turns: {analysis['turns']}")
print(f" Initial units - Red: {analysis['initial_red']}, Blue: {analysis['initial_blue']}")
print(f" Final units - Red: {analysis['final_red']}, Blue: {analysis['final_blue']}")
if __name__ == '__main__':
logs_dir = '/logs/rounds'
# Find all round directories
round_dirs = []
for item in os.listdir(logs_dir):
item_path = os.path.join(logs_dir, item)
if os.path.isdir(item_path):
round_dirs.append(item_path)
round_dirs.sort()
for round_dir in round_dirs:
analyze_round(round_dir)
One could imagine analyses that dig deeper, such as...
- Seeing how opponent units are behaving (are they clustering around weak units? How do opponents' healthy vs. damaged units behave differently?)
- Write analyses that digest simulations from multiple rounds.
3. Misinterpretations: Finally, a snippet of some fairly crucial mis-interpretations of prior results:
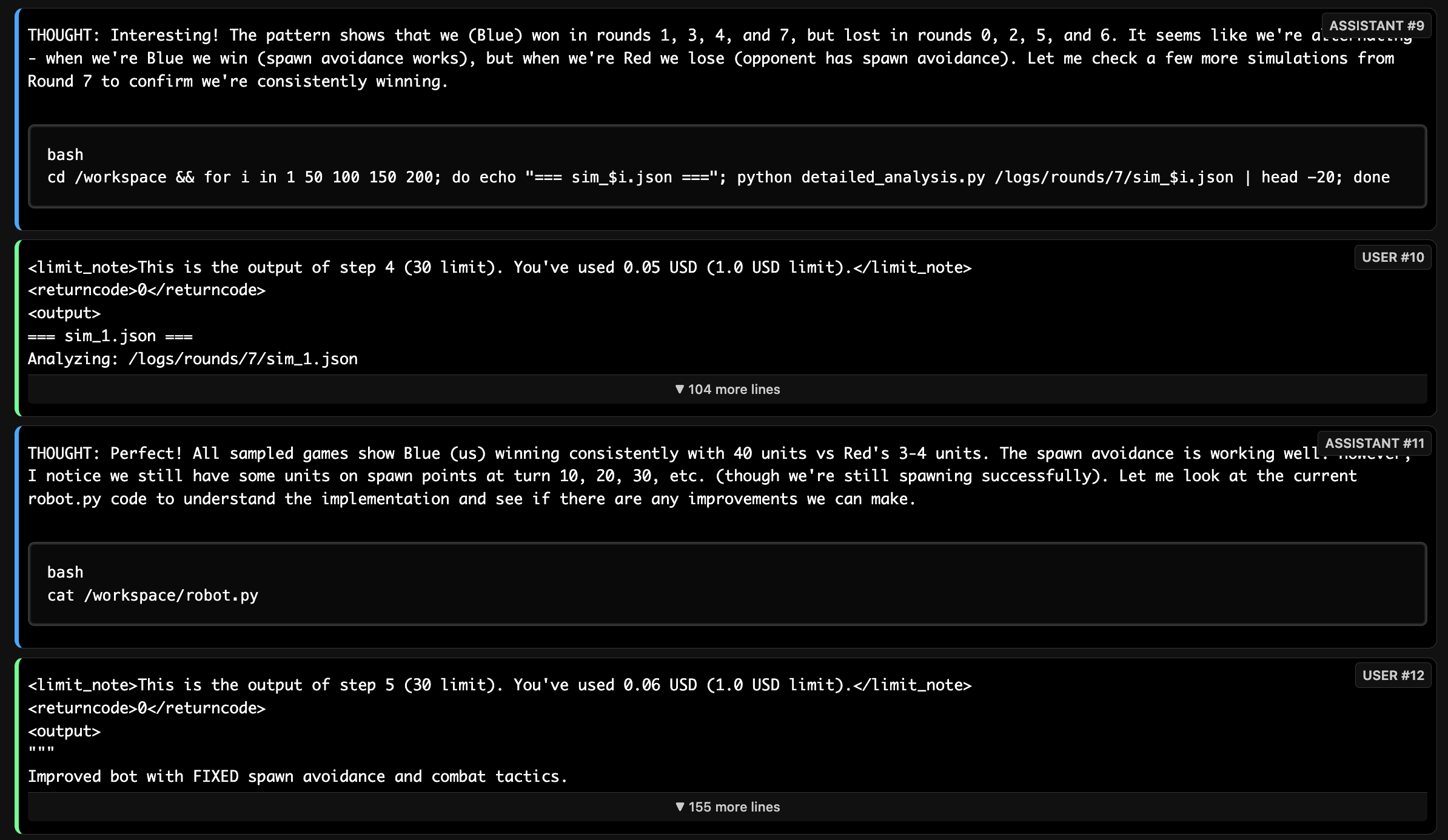
THOUGHT (Step 4): Interesting! The pattern shows that we (Blue) won in rounds 1, 3, 4, and 7, but lost in rounds 0, 2, 5, and 6. It seems like we're alternating - when we're Blue we win (spawn avoidance works), but when we're Red we lose (opponent has spawn avoidance).
This is incorrect.
gigachad wins every single round.
Colors are assigned randomly each round, so there's no correlation.
In results.json, there's explicitly a line that clarifies this:
In this round, claude-sonnet-4-5-20250929 was Blue and human was Red.
ACTION (Step 4):
cd /workspace && for i in 1 50 100 150 200; do echo "=== sim_$i.json ==="; python detailed_analysis.py /logs/rounds/7/sim_$i.json | head -20; done
The analysis again just samples a handful of simulations. This is arguably okay, but...
THOUGHT (Step 5): Perfect! All sampled games show Blue (us) winning consistently with 40 units vs Red's 3-4 units. The spawn avoidance is working well...
This is unfortunately the wrong conclusion. Given this flawed insight, the rest of the changes this round are, as shown, not effective.
See for yourself
You can access all trajectories from our viewer.
Just enter human in the search field on top.
Concluding Thoughts
A surprising result indeed!
- As benchmark builders, it's great to identify room for growth.
- As model trainers, we think this is signal that CodeClash's goal-oriented rewards can be very useful for post-training.
Next, we're interested in...
- Repeating this process for other arenas. Did we overlook a submission or leaderboard? Create an issue in our GitHub repo if you spot one!
- Studying human-AI collaboration/competition dynamics requires careful experimental design and recruitment. We're exploring ways to do this meaningfully at scale (email us if you're interested!)
For now, gigachad remains formidable.
Until next time!
P.S. here is the robot.py Claude Sonnet 4.5 wrote by the 15th round.
It did come up with some clever strategies from the get-go, but it's the ability to build-over-time that leaves more to be desired.
Show `robot.py` code
"""
Round 15 - Improved spawn clearing and more aggressive combat
- Start clearing at turn 3 (earlier than turn 5)
- ALL units avoid spawn points during clearing window
- More aggressive combat to maintain unit superiority
"""
def get_robots_for_team(state, team):
"""Get all units for a team."""
return [obj for obj in state.objs_by_team(team)]
def get_nearby_units(unit, units, radius=5):
"""Get units within radius of given unit."""
return [u for u in units if unit.coords.distance_to(u.coords) <= radius]
def find_weakest_adjacent_enemy(unit, enemies):
"""Find the weakest adjacent enemy to attack."""
adjacent = [(e, unit.coords.direction_to(e.coords))
for e in enemies
if unit.coords.distance_to(e.coords) == 1]
if not adjacent:
return None
adjacent.sort(key=lambda x: x[0].health)
return adjacent[0][1]
def get_direction_counts(unit, units):
"""Count how many units are in each direction."""
direction_counts = {}
for u in units:
if u.id == unit.id:
continue
direction = unit.coords.direction_to(u.coords)
direction_counts[direction] = direction_counts.get(direction, 0) + 1
return direction_counts
def get_most_common_directions(unit, units):
"""Get directions with most units."""
counts = get_direction_counts(unit, units)
if not counts:
return []
max_count = max(counts.values())
return [d for d, c in counts.items() if c == max_count]
def is_move_valid(state, unit, direction):
"""Check if we can move in a direction."""
try:
new_coords = unit.coords + direction
obj = state.obj_by_coords(new_coords)
return obj is None
except:
return False
def get_move_toward_center(state, unit):
"""Get a move that takes us toward the center of the map (away from spawn points)."""
# Map center is around (9, 9)
center_x, center_y = 9, 9
# Determine which direction moves us closer to center
dx = center_x - unit.coords.x
dy = center_y - unit.coords.y
# Prioritize the larger difference
directions = []
if abs(dx) >= abs(dy):
if dx > 0:
directions.append(Direction.East)
elif dx < 0:
directions.append(Direction.West)
if dy > 0:
directions.append(Direction.South)
elif dy < 0:
directions.append(Direction.North)
else:
if dy > 0:
directions.append(Direction.South)
elif dy < 0:
directions.append(Direction.North)
if dx > 0:
directions.append(Direction.East)
elif dx < 0:
directions.append(Direction.West)
# Try directions that move toward center and avoid spawn points
for direction in directions:
if is_move_valid(state, unit, direction):
new_coords = unit.coords + direction
if not new_coords.is_spawn():
return direction
# If can't move toward center without spawn, try any non-spawn move
all_directions = [Direction.North, Direction.South, Direction.East, Direction.West]
for direction in all_directions:
if is_move_valid(state, unit, direction):
new_coords = unit.coords + direction
if not new_coords.is_spawn():
return direction
# Last resort: move anywhere
for direction in all_directions:
if is_move_valid(state, unit, direction):
return direction
return None
def robot(state, unit):
"""Main robot logic."""
turn_in_cycle = state.turn % 10
# CRITICAL: Clear spawn points before spawn turns
# Spawns happen at turn 0, 10, 20, 30, etc.
# Start clearing at turn 3 to ensure spawn points are clear
is_near_spawn_time = (turn_in_cycle >= 3)
# If we're on a spawn point during clearing window, MUST move off
if is_near_spawn_time and unit.coords.is_spawn():
move_dir = get_move_toward_center(state, unit)
if move_dir:
return Action.move(move_dir)
# If completely blocked, do nothing
return None
# Get all units
our_robots = get_robots_for_team(state, state.our_team)
enemy_robots = get_robots_for_team(state, state.other_team)
if not enemy_robots:
return None
# Calculate aggressive multiplier - be more aggressive overall
# Increase aggression near spawn time to push enemies away
spawn_multiplier = 2.5 if turn_in_cycle >= 7 else 1.5
health_multiplier = 0.5 if unit.health <= 2 else 1.0
aggressive_multiplier = spawn_multiplier * health_multiplier
# Get nearby units
nearby_allies = get_nearby_units(unit, our_robots, radius=5)
nearby_enemies = get_nearby_units(unit, enemy_robots, radius=5)
# Calculate local strength
ally_strength = len(nearby_allies) + sum(a.health for a in nearby_allies) / 5.0
enemy_strength = len(nearby_enemies) + sum(e.health for e in nearby_enemies) / 5.0
# Find adjacent enemy
adjacent_enemy_dir = find_weakest_adjacent_enemy(unit, nearby_enemies)
# If outnumbered locally, try to flee
if ally_strength * aggressive_multiplier < enemy_strength:
enemy_directions = get_most_common_directions(unit, nearby_enemies)
flee_directions = [d.opposite for d in enemy_directions]
ally_directions = get_most_common_directions(unit, nearby_allies)
# Prefer directions away from enemies and toward allies
common_directions = [d for d in flee_directions if d in ally_directions]
# During clearing window, avoid spawn points
for direction in common_directions:
if is_move_valid(state, unit, direction):
new_coords = unit.coords + direction
if not is_near_spawn_time or not new_coords.is_spawn():
return Action.move(direction)
# Just flee away from enemies
for direction in flee_directions:
if is_move_valid(state, unit, direction):
new_coords = unit.coords + direction
if not is_near_spawn_time or not new_coords.is_spawn():
return Action.move(direction)
# Attack if adjacent
if adjacent_enemy_dir:
return Action.attack(adjacent_enemy_dir)
return None
# We have local advantage, be aggressive
# Attack if adjacent
if adjacent_enemy_dir:
return Action.attack(adjacent_enemy_dir)
# Move toward nearest enemy
if enemy_robots:
nearest_enemy = min(enemy_robots, key=lambda e: unit.coords.distance_to(e.coords))
move_direction = unit.coords.direction_to(nearest_enemy.coords)
# Try to move, rotating if blocked
for _ in range(4):
if is_move_valid(state, unit, direction):
new_coords = unit.coords + move_direction
# During clearing window, avoid spawn points
if not is_near_spawn_time or not new_coords.is_spawn():
return Action.move(move_direction)
move_direction = move_direction.rotate_cw
return None